Comment ça marche ?
Les modes de déplacement
Les droides TwinswHeel se déplacent suivant 3 modes principaux
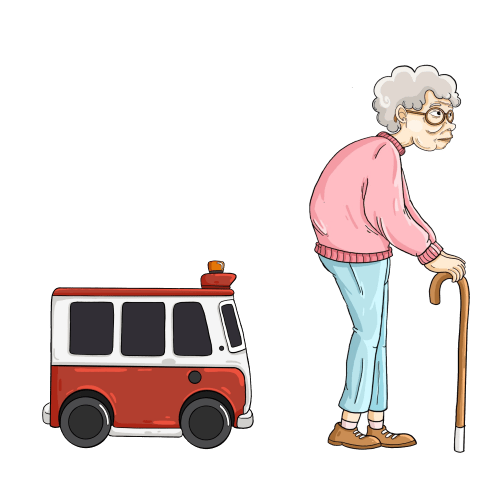
1. Mode collaboratif ou follow-me
Dans ce mode, le droide est appairé avec un maitre. Cet appairage est réalisé grâce à une redondance de tacking comme par exemple visuel. En effet le tracking du maitre est fait avec les capteurs de perception du droide comme le lidar et les caméras. Des algorithmes d’intelligence artificielle et d’automatique avancé permettent de réaliser ce tracking. Ensuite le droide suit son maitre comme un petit chien qui porte ses charges lourdes. En moyenne, la distance entre le maitre et le droide est de 2 mètres. Le droide est capable de détecter les potentiels obstacles qui pourraient s’intercaler entre lui et le maitre de façon à les éviter ou se stopper.
En mode follow-me, le droide reste un robot semi-autonome, où le maitre doit rester extrêmement vigilant. Le maitre reste 100 % responsable des mouvements du droide en follow-me
Autorisations
Site privé : approbation du responsable du site
Ville / site public : toléré avec assurance
2. Mode autonome

Les droides peuvent se déplacer de façon autonome sur un territoire connu. En effet pour un déploiement en mode autonome, le droide doit connaitre son environnement d’évolution. Pour cela on débute par créer une carte ultra détaillée du lieu. Ces cartes sont construites à partir d’algorithmes de type SLAM (localisation et cartographie simultanée) et d’une redondance de capteurs de perception. Le droide se localise dans l’espace grâce à ces cartes et aux GNSS (ie GPS).
Sur ces cartes nous construisons des routes virtuelles qui vont ensuite être suivies par les droides. Ces routes virtuelles doivent être définies de façon sûre et être validées par les régulateurs nationaux et locaux. Le droide dispose alors d’un réseau de routes virtuelles que des algorithmes puissants optimisent pour déterminer le meilleur trajet pour aller de A à B ou en tournée suivant de multiples contraintes.
S’il y a un obstacle sur la route virtuelle du droide, soit le droide est autorisé à le contourner dans une certaine bande autour de la route virtuelle, soit le safety driver prend la main sur le droide pour le guider dans le contournement de cet obstacle. La détection des obstacles par le droide est fait par des algorithmes extrêmement puissants d’intelligence artificielle qui se basent sur les différentes caméras, lidars, capteurs ultra-sons du droide. Ces algorithmes sont capables de reconnaitre le type d’obstacle et lorsqu’ils sont mouvants de prédire leurs trajectoires fonction de la classe de l’objet (un piéton est différent d’une voiture)
En mode autonome, le droide se déplace sous la responsabilité du safety-driver qui aujourd’hui doit rester à proximité. Les expérimentations en cours vont nous permettre de faire la démonstration de sécurité pour un safety driver à distance (liaison 4G et 5G). Le safety driver porte l’entière responsabilité des mouvements du droide
Autorisations
Site privé : approbation du responsable du site
Ville / site public : soumis à autorisation d’expérimentation
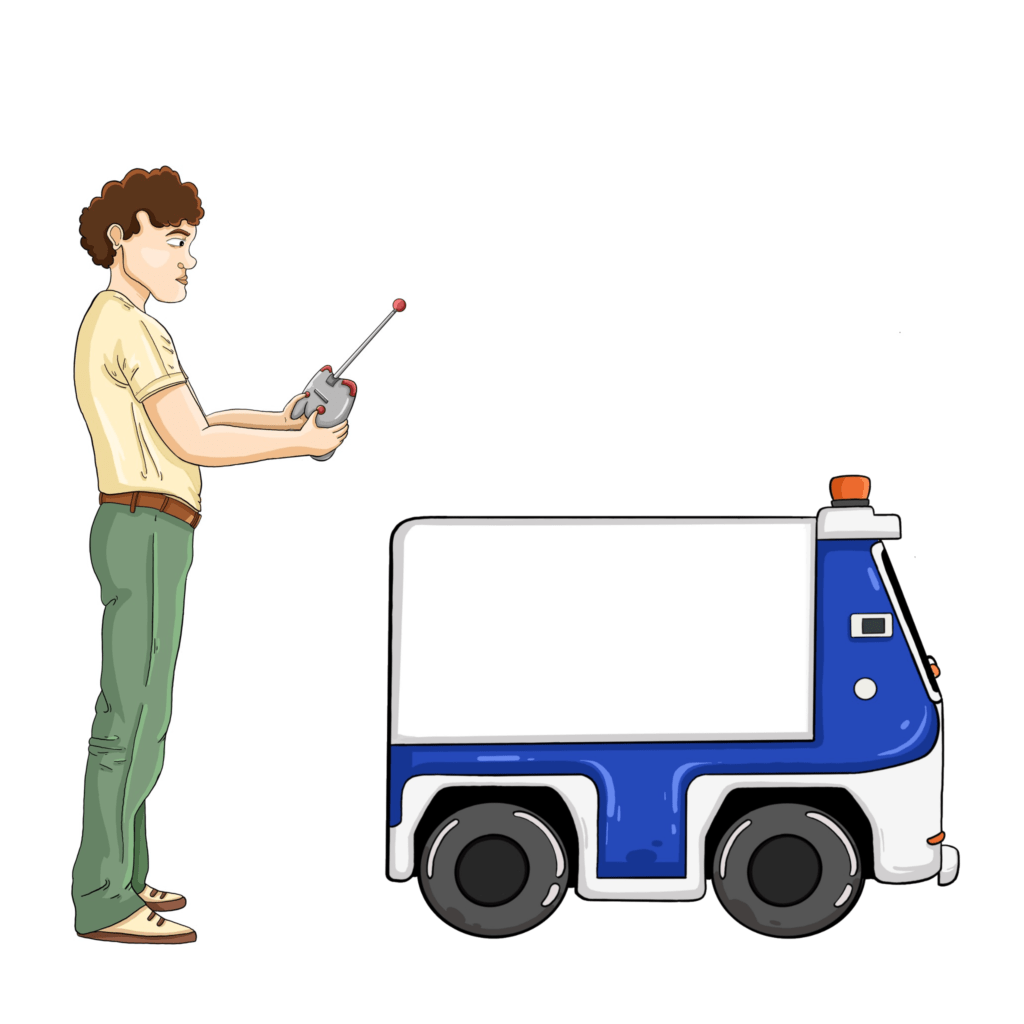
3. Mode pilotage à distance
est un mode intermédiaire qui est en réalité intimement lié au mode autonome. En effet lorsque nous aurons le droit de déporter le safety driver, celui-ci pourra être dans un local à distance et superviser 1 (ou plusieurs) droide. Pour cela, le safety driver doit pouvoir parfaitement comprendre et percevoir l’environnement immédiat autour du droide. Nous faisons donc remonter sur les écrans du poste de commande du safety-driver toutes les caméras (visages / plaques floutés) et autres capteurs de perception. Grace à cela le safety driver peut anticiper les risques d’incident et si besoin prendre la main sur le droide à distance grâce à un joystick.
Les flux vidéo et des autres capteurs qui remontent du droide vers le safety-driver sont compressés et optimisés de façon à réduire au maximum notre empreinte de bande passante sur les réseaux de datas. Ainsi nous sommes plus robuste à la qualité du réseau GSM et nous réduisons notre empreinte CO2.
Si la liaison / communication entre le poste du safety-driver et le droide est coupée, le droide se stoppe instantanément.
Autorisations
Site privé : approbation du responsable du site
Ville / site public : soumis à autorisation d’expérimentation
Le safety-driver
C’est une personne qui a la responsabilité du bon fonctionnement du droide. Il doit s’assurer que l’état du droide lui permet de rouler en toute sécurité avant chaque départ et au cours de ses roulages. De plus le safety driver, lors des trajets du droide, doit s’assurer qu’il n’y a aucun risque d’incident avec soit des objets mouvants (piéton, vélo, moto, voiture, etc…) ou avec l’infrastructure (poubelle, panneau, arbre, etc…). Le safety driver à toujours toute autorité sur tous les modes de fonctionnement pour stopper le droide. En mode follow-me, le maitre et le safety driver sont la même personne. En mode autonome, un droide ne peut rouler sans safety-driver ; qui peut être à proximité ou à distance.
Le rôle du safety driver en roulage est de parfaitement comprendre l’environnement immédiat du droide pour en apprécier les potentiels risques d’incident. S’il détecte un risque, il doit stopper le droide et prévenir par exemple les autres usagers autour du droide du risque. En mode autonome, s’il y a un obstacle sur la route virtuelle du droide, le safety driver peut prendre la main sur le droide et lui permettre de contourner cet obstacle avant de le remettre sur sa route virtuelle pour qu’il puisse continuer sa mission en autonome.
Autorisations
Site privé : le safety driver peut-être à distance
Ville / site public : le safety driver doit être à proximité du droide avec une évolution en cours pour qu’il puisse être à distance.